ژیروسکوپ Gyroscope
بررسی ژیروسکوپ
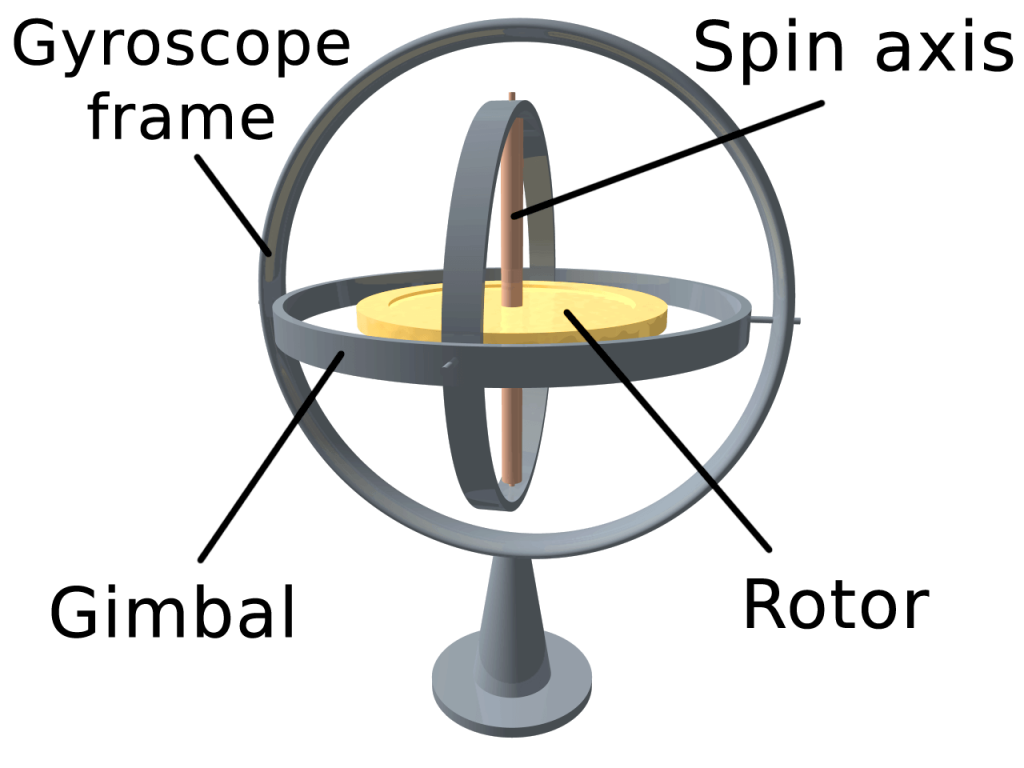
ژیروسکوپ (Gyroscope) وسیله ای است که برای اندازه گیری یا حفظ وضعیت زاویه (Orientation) مورد استفاده قرار می گیرد. ساختار یک ژیروسکوپ معمولا شامل موارد زیر است:
- حلقه ی خارجی (Frame)
- حلقه ی داخلی (Gimbal)
- روتور (Rotor)
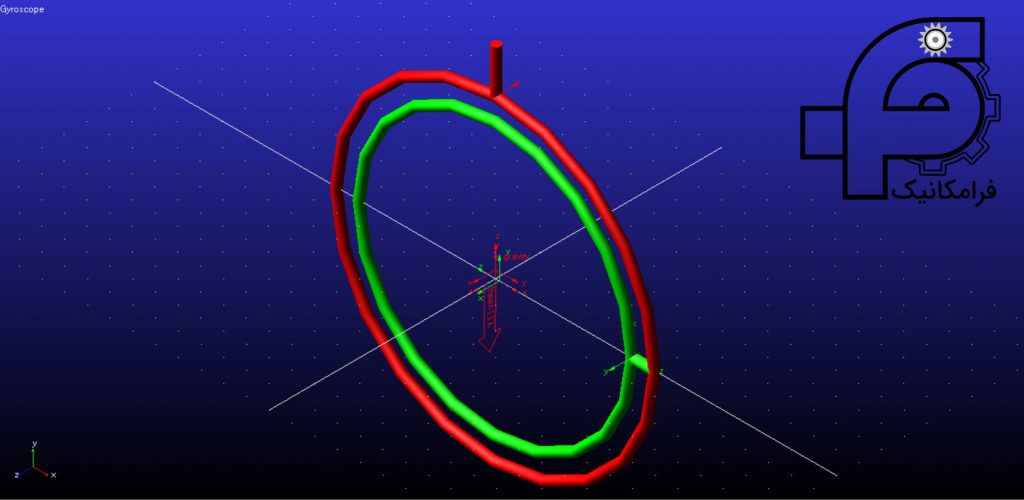
که در تصویر زیر، اجزای یک ژیروسکوپ نشان داده شده است:
چنانچه روتور با سرعت زیادی دوران کند، در این صورت نیرو ها و گشتاورهای خارجی که به ژیروسکوپ وارد شوند قادر به تغییر جهت ژیروسکوپ نیستند. این موضوع به دلیل مومنتوم زاویه ای زیادی است که در اثر چرخش روتور ایجاد می شود.
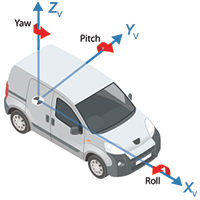
حرکت ژیروسکوپی (Gyroscopic Motion)
این حرکت بدین صورت است:
محوری را در نظر بگیرید که جسمی به دور آن دوران می کند. در حالی که خود حول محور دیگر دوران داشته باشد. هرچند که توصیف کامل حرکت شامل پیچیدگیهای زیادی است. حالت ساده شده که در آن حرکت حرکت دورانی (Spining) با سرعت زاویه ای ثابت انجام میشود، و محور این دوران خود با نرخ ثابت در حال دوران است. این حرکت ژیروسکوپی دارای کاربرد های زیادی است که در ادامه به این کاربردها می پردازیم.
تاریخچه استفاده از ژیروسکوپ
اولین ژیروسکوپ شناخته شده توسط یک آلمانی به نام یوهان بوهننبرگر که اولین بار در سال ۱۸۱۷ دربارهاش نوشت ساخته شده است. ژیروسکوپ بوهننبرگر بر اساس یک کرهٔ بزرگ چرخنده ساخته شد. در سال ۱۸۳۲ والتر جانسون آمریکایی ژیروسکوپی ساخت که براساس دیسک چرخنده کار میکرد. ریاضیدان فرانسوی پیر لاپلاس زمانی که در دانشگاه اکول پلیتکنیک کار میکرد این ماشین را به عنوان ابزار کمک آموزشی پیشنهاد کرد. و به این شکل این وسیله در معرض توجه قرار گرفت.
در سالهای دهه ۱۹۶۰ موتورهای الکتریکی این مفهوم را امکانپذیر کردند و این به ساخته شدن اولین نمونههای قطبنماهای ژیروسکوپی انجامید. اولین قطبنمای ژیروسکوپی در سال ۱۹۰۸ توسط مخترع آلمانی HermannAnschutz-Kaempfe معرفی شد. کمی بعد در همان سالElmer Sperry آمریکایی طراحی خود را ادامه داد و به زودی ملتهای دیگر هم اهمیت نظامی این اختراع را دریافتند.
شرکت Sperry Gyroscope به زودی فعالیت خود را به ساخت پایدارکنندهای هواپیماها و کشتیها هم توسعه داد. و سایر سازندگان چرخشنما هم به این کار پرداختند. در سال ۱۹۱۷ شرکت Chandler Company of Indianapolis در ایندیانا «ژیروسکوپ Chandler» را به عنوان یک اسباب بازی با یک محور و یک بند تولید کرد. این وسیله تا امروز تولیدش ادامه پیدا کردهاست و به عنوان یک اسباب بازی کلاسیک آمریکایی شناخته میشود.
کاربردهای مهندسی ژیروسکوپ
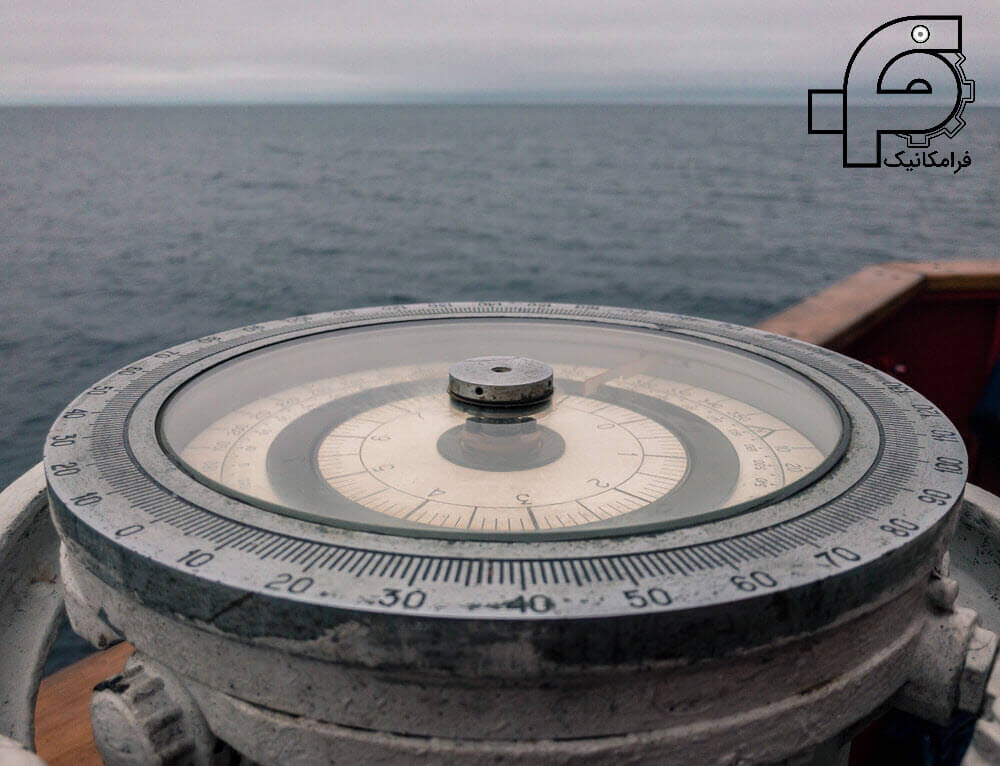
ژیروسکوپ دارای کاربردهای مهندسی مهمی است. در صورتی که Gyro در یک Gimbal ring نصب شود از ممان های خارجی آزاد خواهد بود و محور آن در یک جهت ثابت در فضا بدون تاثیر چگونگی دوران اسکلت و ساختمان آن باقی خواهد ماند. بدین ترتیب ژیروسکوپ برای وسایل هدایت کننده داخلی و سایر وسایل کنترل جهت به کار می رود. به عنوان مثال در ناوبری و کشتیرانی از ژیروسکوپ ها برای محاسبه ی دقیق شمال و کنترل جهت کشتی استفاده می شود.

تحلیل مکانیزم ژیروسکوپ در نرم افزار تحلیل دینامیکی آدامز
انجام هر پروژه ای در نرم افزار آدامز شامل چهار گام اصلی است. که برای پروژه ی ژیروسکوپ، این چهار گام به طور خلاصه و با شکل توضیح داده می شود.
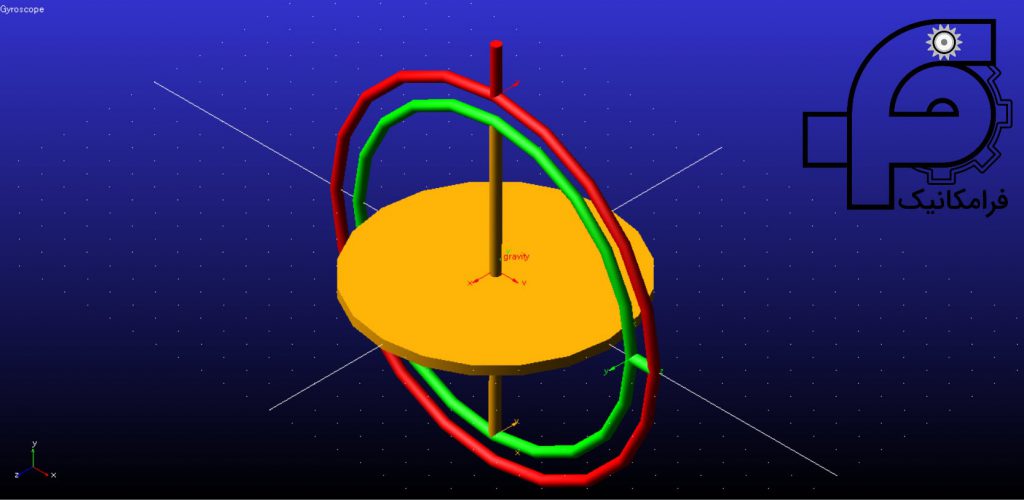
1- گام مدلسازی
به منظور مدلسازی ژیروسکوپ در نرم افزار تحلیل دینامیکی آدامز (Adams)، در ابتدا حلقه های داخلی و خارجی ژیروسکوپ را ایجاد می نماییم.
2- گام قیدگذاری
حال باید قیدگذاری ها انجام شود. سیستم ژیروسکوپ باید با یک قید spherical joint به زمین متصل شود. و سایر اتصالات مدل ژیروسکوپ به صورت لولایی یا Revoloute joint می باشند.
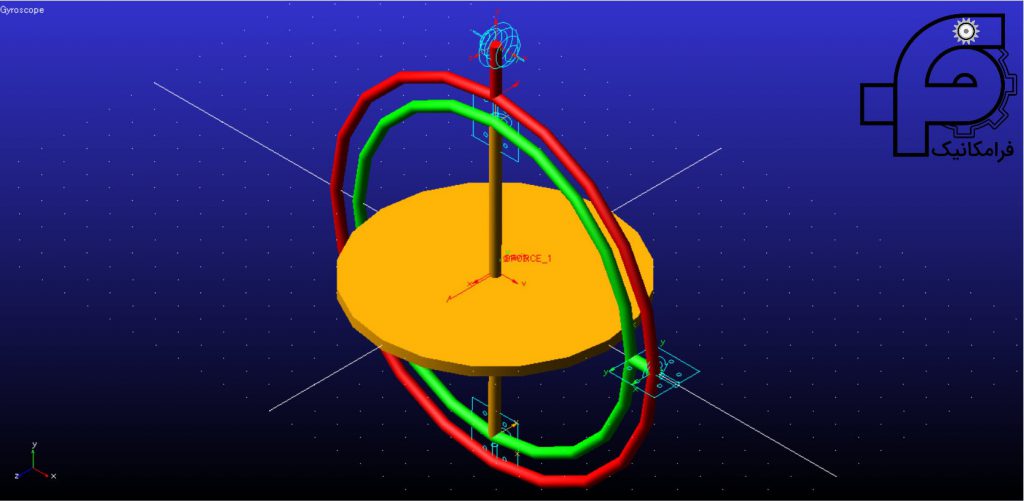

3-گام حرکت گذاری
نیرویی به مرکز جرم روتور وارد می کنیم. این نیرو نقش اغتشاش را دارد که طی مدت زمان کوتاهی به سیستم وارد می شود. در ادامه طی شبیه سازی ها، رفتار ژیروسکوپ تحت اعمال نیرویی که تعریف کردیم بررسی می شود.
4- گام شبیه سازی و تحلیل
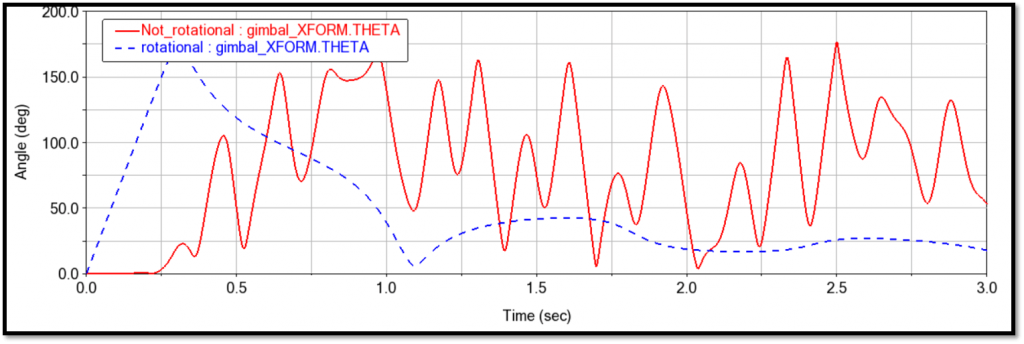
دو شبیه سازی را به منظور تحلیل دینامیکی و مقایسه، انجام می دهیم:
شبیه سازی اول: روتور هیچ حرکت دورانی یا spinning نداشته باشذ.
شبیه سازی دوم: روتور با سرعت زاویه ای 30000 درجه بر ثانیه حرکت دورانی انجام دهد.
در نمودار زیر می توان نمودار مربوط به مقایسه ی این دو شبیه سازی را مشاهده نمود.





دیدگاهتان را بنویسید