انواع پتکها
انواع پتکها – قسمت اول

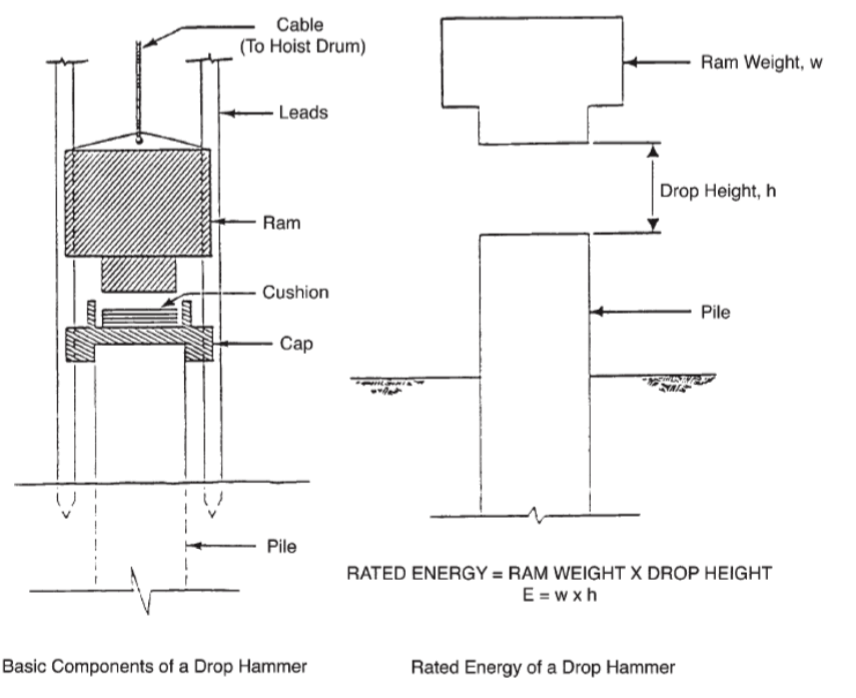
پتکهای ثقلی – سقوطی (Gravity – Drop Hammers)
- یک سندان یا پایه (Base)
- ستونهای حمایتکننده، که شامل راهنماهای کوبه نیز میباشند(Ram guides)
- تجهیزات بازگرداننده RAM به موقعیت شروع اولیه
- انرژی لازم جهت تغییر شکل قطعه کار، در اثر حرکت روبه پایین کوبه (سقوط کوبه(Ram)) تامین میشود. ارتفاع سقوط و وزن کوبه (Ram) تعیینکننده نیروی اعمالی است.
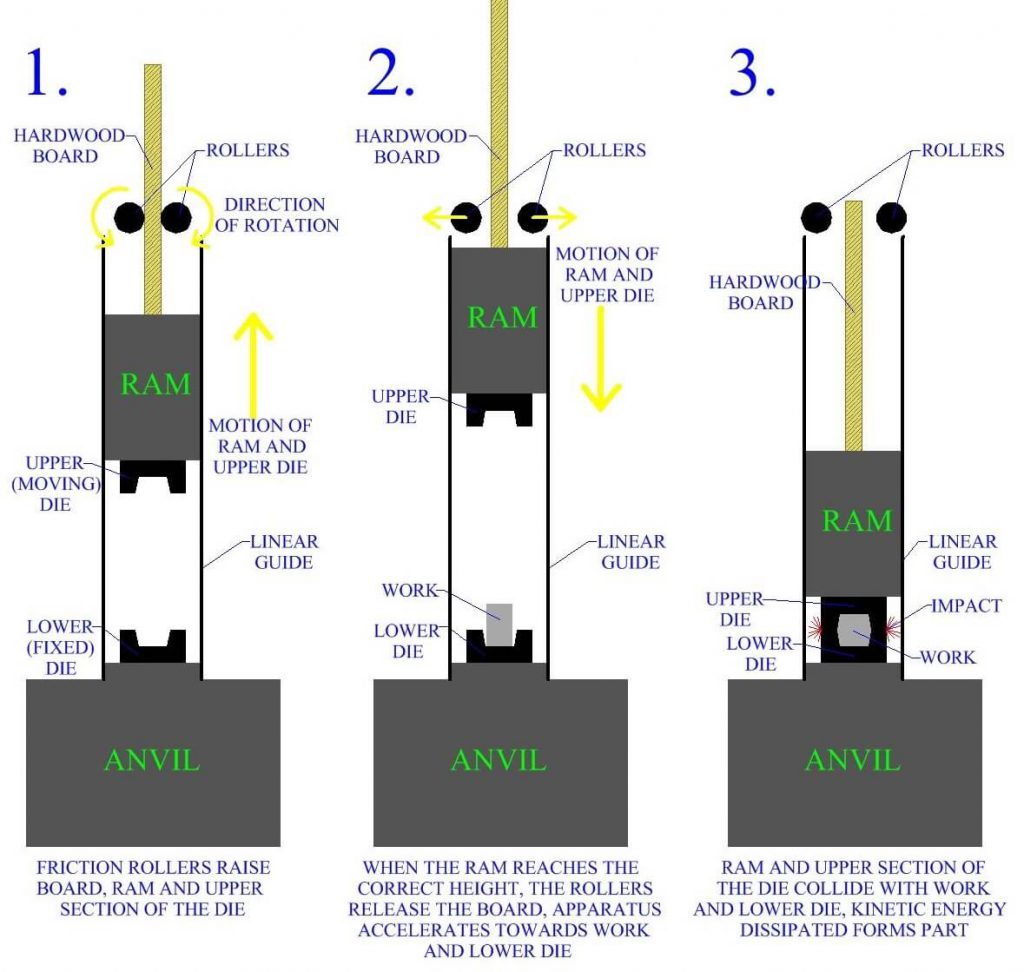
پتکهای تخه ضربهای (Board – Drop Hammers)
بطور گستردهای از این پرسها استفاده میشود. به ویژه جهت عملیات فورجینگ قطعاتی که وزن آنها بیش از چند کیلوگرم نباشد، بکار میرود. در پرسهای پتک تخته ضربهای کوبه(Ram) به وسیلهی یک یا بیشتر تخته راهنما (boards keyed) بالا رفته و در طی مسیر خود از میان دو غلتک اصطکاکی (friction rolls) که در بالای پتک قرار گرفتهاند، عبور مینمایند. تختهها (boards) غلتکهایی هستند که کوبه را به طرف بالا هدایت کرده سپس بطور مکانیکی آزاد شده و اجازه میدهند کوبه از ارتفاع مطلوب سقوط نماید.
توان لازم (انرژی لازم) جهت بالا بردن کوبه، بوسیلهی یک یا چند موتور تامین میشود.
تناژ چکش(پتکها) بر مبنای وزن کوبه در حال سقوط، از Kg180 تا Kg4500 (400-1000 lb) و محدوده استاندارد از Kg450 تا Kg2250 (1000-5000 lb) در واحدها (جزءهای) Kg225 و Kg450 طبقه بندی شده است. ارتفاع سقوط کوبه بسته به میزان سایز چکشها مختلف است. این ارتفاع از mm900 (35 in) برای پرس Kg180 (400 lb) تا m2 (75 in) برای پرس Kg3400 (7500 lb) مدنظر گرفته شده است. ارتفاع سقوط و بنابراین نیروی موثر(اصابت) () پتک، تقریبا بر حسب تنظیمات انجام شده ثابت بوده و نمیتوان بدون توقف ماشین و تنظیمات طول کورس () تعداد آن راتغییر داد. سندانهای () پرسهای پتک تخته ضربهای 25-26 برابر سنگینترند.
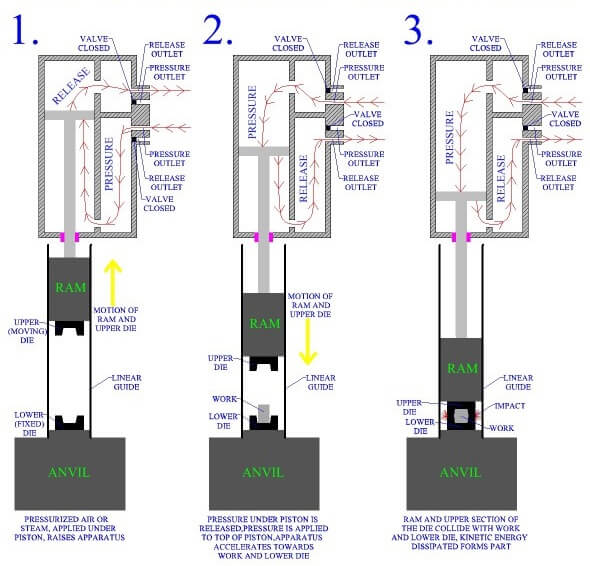
پتک سقوطی با بالابر ثقلی (The air-lift gravity drop hammers)
این پتکها، مشابه پتک تخته ضربهای (board-drop hammers) است و و نیروی فورج از رانش حاصل از وزن کوبه مونتاژ شده و نیمه بالایی قالب تامین میشود. تفاوت این نوع پتکها با پتکهای تخته ضربهای درنوع حرکت کوبه آنهاست.
در این نوع پتکها نیروی بالابر ثقلی (air- lift hammers) به وسیله هوا یا انرژی بخار تامین میشود. بازدههای کنترلکننده کورس (Store control doges) روی اهرمهای نوسانکننده، از پیش تنظیم شدهاند وبه وسیله کوبه و انرژی کنترلشده مطابق سیستم سیلندر کوبه تحریک میشوند(بکار گرفته میشوند).
با عملکرد پتک، بازوها (dogs) میتوانند مجددا نسبت به طول اهرم نوسانکننده، تنظیم شوند. تجهیزات قابل دسترس(در این نوع پرسها)، این اجازه را بما میدهند که هم در کورسهای بلند و هم در کورسهای کوتاه تغییرات داشته باشیم.
کوبه در یک موقعیت خاص، بوسیله یک سیستم میله پیستونی (piston-rod) نگاه داشته میشود و سیستم مذکور نیز بوسیله یک سیلندر که با هوای فشرده به صورت مجزا کار میکند، عمل مینماید
هنگامی که اپراتور پدال پایی (treadle) را میفشارد، هوا وارد سیلندر شده و نیروی بسته شدن (clamp) بطور افقی افزایش مییابد و کوبه، عمل مینماید این سیکل تا زمانیکه اپراتور پایش را از روی پدال برندارد، ادامه مییابد. با برداشتن پدال سیستم Ram عمل مینماید. عمل آزاد شده پدال نباید زمانی که Ram به سوی پایین حرکت نماید، صورت گیرد. این عمل باعث کرنش اضافی به میله Clamp و دیگر قطعات آن میشود. اساسا محدوده اندازه (ظرفیت) پتکهای ثقلی مذکور، ازKg 225 تا Kg4500 است. وزن قطعه فورج شده توسط این نوع پرسها با پرسهای تخته ضربهای متشابه است.
پتکهای سقوطی الکتروهیدرولیکی (Electro hydraulic gravity drop hammers)
در سالهای اخیر، دو ابداع مهم و عمده در طراحی پتکهای معرفی شده است. اولین ابداع پتک سقوطی ثقلی الکتروهیدرولیکی است. در این نوع پتکها کوبه توسط فشار روغن که در مقابل بالشتک هوای فشرده (air cushion) قرار گرفته بالا میرود.
هوای فشرده به آرامی در پشت کوبه توزیع شده و باعث شتاب یافتن آن، در حین حرکت به سمت پایین میگردد. بنابراین پتکهای سقوطی الکتروهیدرولیکی، یک حداقل انرژی و توان را در هنگام عملکرد دارند. دومین ابداع در طراحی پتکها، استفاده از دمش به طور الکترونیکی و کنترل انرژی است.
چنین کنترلهایی به کاربر (اپراتور) این اجازه را میدهده بر اسا یک برنامه، کوبه از یک ارتفاع مشخص به ازاء هر دمش (blow) خاص، عمل نماید (سقوط کند).
به عنوان نتیجه، اپراتور میتواند به طور اتوماتیک، تعداد ضرب موردنظر را ددر فورج، در هر محفظه قالبی با تمرکز نیروی موردنظر( به صورت دمش خاص) تنظیم نماید.
کنترل دمش به طور الکترونیکی باعث افزایش راندمان پتک شده و همچنین ارتعاش (vibration) و اختلال (noise) را در حین عملکرد پتک کاهش میدهد، بنابراین نیازی به پتکهایی با دمش بسیار بالا نمیباشد. در واقع نیرو را میتوان متمرکز کرد.







دیدگاهتان را بنویسید